Balloon Campaign - PMC-Turbo - Scandinavia 2018
Home | Instruments | News | Quicklooks | Telemetry | Contact | Live Stream
Newer posts
Day before launch (7 July 2018)
2132LT - Powered up lidar.
1735LT - We slept most of the day in preparation for an early morning launch attempt tomorrow morning. Pickup is scheduled for Sunday 0100LT, and we will start powering up and checkout electronics around 2300LT today. The sky is overcast which means we may have to bring the chiller out to the flight line for the final lidar test before launch. With relatively warm clouds above, infrared radiating from the radiator can't escape into space and, as a result, the radiator won't be effective enough to cool the laser. This will of course change once the payload passes the cloud layer on the way up to float altitude. At float, the remaining atmosphere is largely transparent to thermal infrared radiation. Then the radiator is able to ‘see‘ the cold outer space, resulting in cooling of the radiator surface. In fact, without heating, the equilibrium temperature of the radiator is around -60°C.
New schedule (6 July 2018)
New launch attempt, pickup Sunday 0100LT / Saturday 2300Z, launch Sunday 0800LT / 0600Z.
Launch attempt #5 (5 July 2018)
2245LT - Payload on the launch pad. First part of lidar checkout completed.
2340LT - Laser check completed. UTP checks ongoing. We are trying to speed things up for an early launch.
0005LT - We are aiming for a launch at 0230LT.
0120LT - Launch scrubbed due to precipitation now being only one hour out.
The launch attempt was the furthest a payload has gotten to launching before cancellation at Esrange. We completed all checks of the payload and balloon systems, the cloth which protects the balloon was put down on the ground and the balloon was threaded into the spool. The next step would have been to drive the pickup with the balloon box on the trailer towards the launch vehicle and at the same time release the balloon from the box (see pictures below). Once that is done, we are practically committed to a launch. Although in principle the balloon can be put back into its storage container, this was never done in the past due to risk of damage. To save weight, the balloon material is similar to cling wrap with cables embedded for strength, and it is easy to tear it if not handled very carefully. All balloons are handmade at a factory in the US.
 PMC-Turbo in the midnight sun PMC-Turbo in the midnight sun |
 Upper part of the flight train with the upper termination package (right) and the parachute (left) Upper part of the flight train with the upper termination package (right) and the parachute (left) |
 The top plate of the balloon. Mounted on this plate are the helium valve, the balloon tracker (essentially a GPS receiver which
transmits the position of the balloon via Iridium), and a radar transponder for air traffic control. The top plate of the balloon. Mounted on this plate are the helium valve, the balloon tracker (essentially a GPS receiver which
transmits the position of the balloon via Iridium), and a radar transponder for air traffic control. |
 The balloon is wrapped into two protective bags, an inner bag (yellow) and an outer bag (red). The balloon is wrapped into two protective bags, an inner bag (yellow) and an outer bag (red). |
Weather briefing (4 July 2018)
Next launch attempt will be on Thursday/Friday night. Pickup is at 2200LT / 2000Z (Thursday) followed by a planned launch at 0400LT / 0200Z (Friday). This is again a marginal launch opportunity because of variable winds. A more stable pattern is foretasted for Monday.
Launch attempt #4 (2 July 2018)
Pickup is scheduled for 2200LT / 2000Z with a planned launch at 0400LT / 0200Z (Tuesday).
2050LT - Powering up lidar. It is quite warm in the hangar, about 30°C. Waiting for lidar electronics to cool down.
2155LT - First part of lidar checkout completed. Waiting for pickup.
2310LT - Moved gondola out to the launch pad for communications testing.
0200LT - Lidar tests completed. CSBF is working on communication issues.
0305LT - Launch scrubbed due to wrong wind direction.
 PMC-Turbo on the launch pad for communications and lidar testing PMC-Turbo on the launch pad for communications and lidar testing |
Launch attempt cancelled (1 July 2018)
The weather forecast did not look good this morning and the launch attempt was called off before the countdown started.
Launch attempt #2 (30 June 2018)
1640LT - Powering up lidar electronics
2010LT - Launch scrubbed due to high winds. We try again tomorrow.
Weather briefing (29 June 2018)
New launch attempt on Saturday: Pickup 1800LT / 1500Z, Launch 0000LT (Sunday) / 2200Z. The window is again marginal at best as wind speeds are rather high until midnight and afterwards the wind is expected to shift rapidly into the forbidden launch direction. However, with no launch opportunities coming up in the following days we try to make short windows work.
HIWIND is now above Canada and still going strong. An unplanned temporary dropout of the Iridium link and cosmic rays resulted in some excitement in the operations area last night.
Launch attempt (28 June 2018)
0016LT - It will be raining for the next 3-4 hours. Pickup postponed.
0058LT - First part of lidar checkout completed.
0330LT - Launch scrubbed due to deteriorating weather conditions. Powering down lidar.
First launch attempt for PMC-Turbo scheduled (27 June 2018)
We are targeting a launch time of 0700LT/ 0500Z on Thursday and the launch window could last as late as 1100LT/ 0900Z. Pickup is scheduled for 0100LT.
HIWIND is now well into its second day and the instrument is performing well. The ground track can be found here.
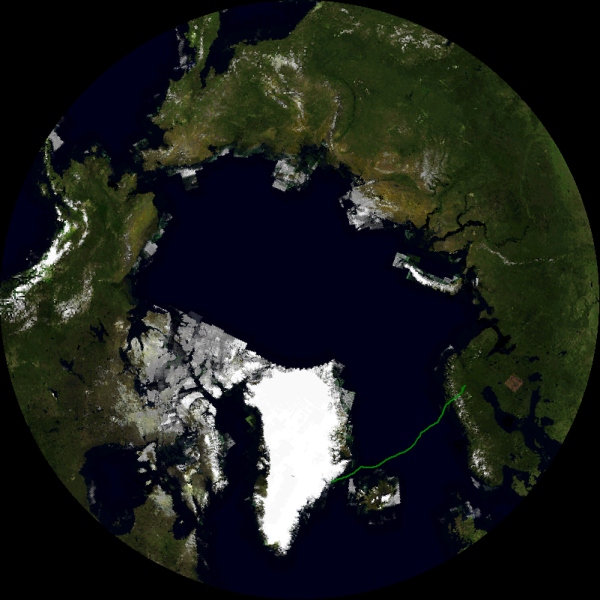 Ground track of HIWIND (Source CSBF). Ground track of HIWIND (Source CSBF). |
Operators on board (26 June 2018)
Meanwhile in Gilching, Mausi and Elefant were comfortable watching the live stream of their siblings flying on the rocket and docking at the International Space Station, when they decided that spaceflight would be a worthwhile adventure. Therefore they went shopping to Starnberg to have space helmets fitted. Back home, space suits were tailored for both and they enjoyed a last bath in the green grass (and some berries) before embarking on their journey to the launch site Kiruna. Here, they climbed into the gondola and are excited about the upcoming stratospheric flight. They will enjoy views of Earth, the atmosphere, noctilucent clouds, and they will keep a close eye on the performance of the laser beam and lidar. You'll be able to watch them doing so on the viscam live image. Have a safe trip, Mausi and Elefant, and see you again soon! (Felix says you won't be allowed to fly again if you don't come back).
 Der E-le-fant Im Raum-an-zug Fliegt mit der Maus Hoch hinaus Balloon song (Felix, 5 yrs) |
 Space suits sewing patterns by Benjamin, 2 yrs |
Go HIWIND (25 June 2018)
HIWIND was launched successfully shortly after midnight. Congratulations to Qian, Alice, and the HIWIND team.
With HIWIND gone, PMC-Turbo is next in line for launch. However, the weather forecast deteriorated rapidly and launch opportunities don't look good for the next few days. We have to sit tight and wait.
 The spool with the trailers carrying helium cylinders behind. The balloon is still wrapped in the red protective cover. The spool with the trailers carrying helium cylinders behind. The balloon is still wrapped in the red protective cover. |
 The silver box is the termination package which sits between the balloon (left) and the parachute (right). The silver box is the termination package which sits between the balloon (left) and the parachute (right). |
 Tip of the balloon halfway through inflation. Tip of the balloon halfway through inflation. |
 Lower part of the flight train. The red part is the parachute. Lower part of the flight train. The red part is the parachute. |
 Seconds before release of the payload. Seconds before release of the payload. |
 HIWIND in flight. HIWIND in flight. |
We are back on (23 June 2018)
CSBF has received permission to resume flight operations. Next launch opportunity for HIWIND is Sunday night.
Compatibility Testing (16/17 June 2018)
With the HIWIND launch attempt cancelled, we got our chance to carry out compatibility testing of the PMC-Turbo payload. That test is basically a simulated launch where all payload systems and communication equipment are switched on and tested. The gondola was picked up by the launch vehicle HERCULES at midnight and taken outside the hangar for communications testing. We send commands and received telemetry over the various line-of-sight (LOS) and Iridium links. For the TDRSS links, however, we had to wait until 5 am until the satellite rose above the horizon. Meanwhile we turned the gondola into the midnight sun and measured the current produced by the two big solar arrays and performed cooling system tests. Without the hangar roof above, the lidar radiator began rejecting immediately after the gondola left the hangar and we had to switch on heaters in order to maintain the coolant temperature. Finally, with the TDRSS tests completed, we powered up the lidar for about one hour and acquired a few atmospheric profiles with the lidar before taking the gondola back inside the hangar. That completed a very successful compatibility test.
 PMC-Turbo being picked up PMC-Turbo being picked up |
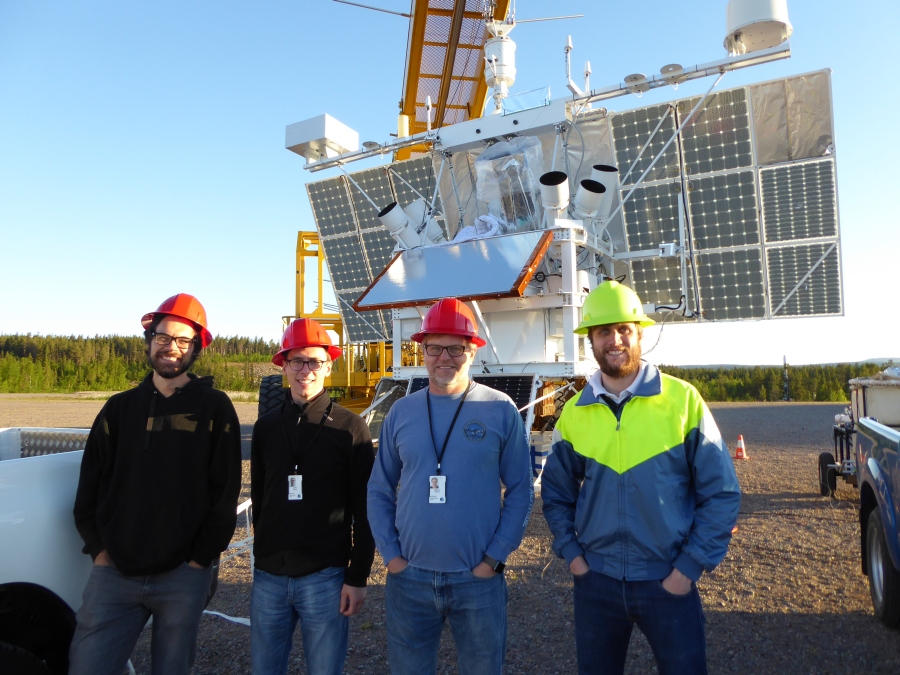 Christopher, Bernd, Biff and Bjorn in front of the gondola. Christopher, Bernd, Biff and Bjorn in front of the gondola. |
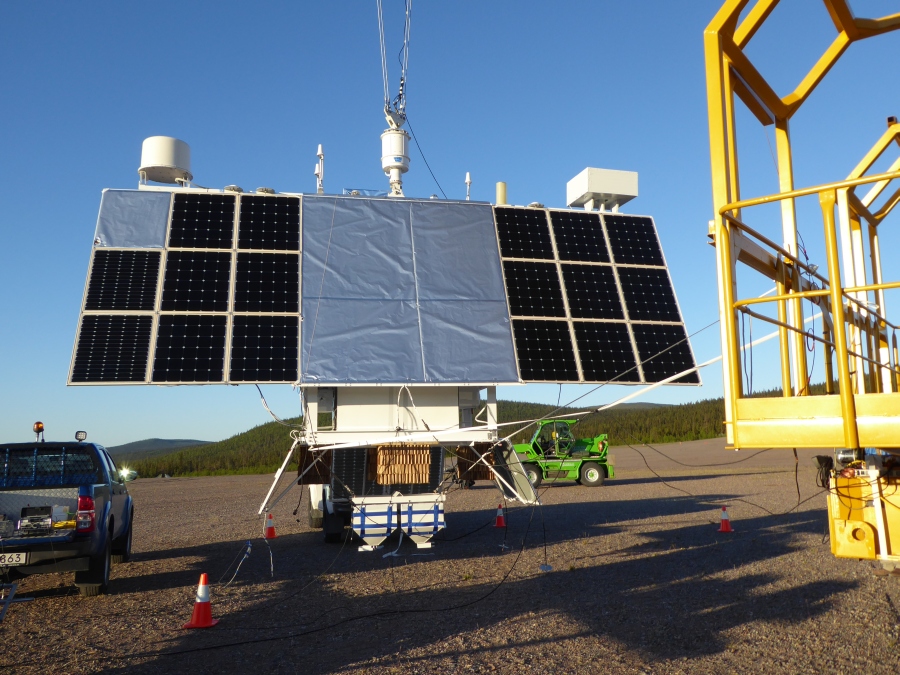 The solar arrays with the sun shield in between. The solar arrays with the sun shield in between. |
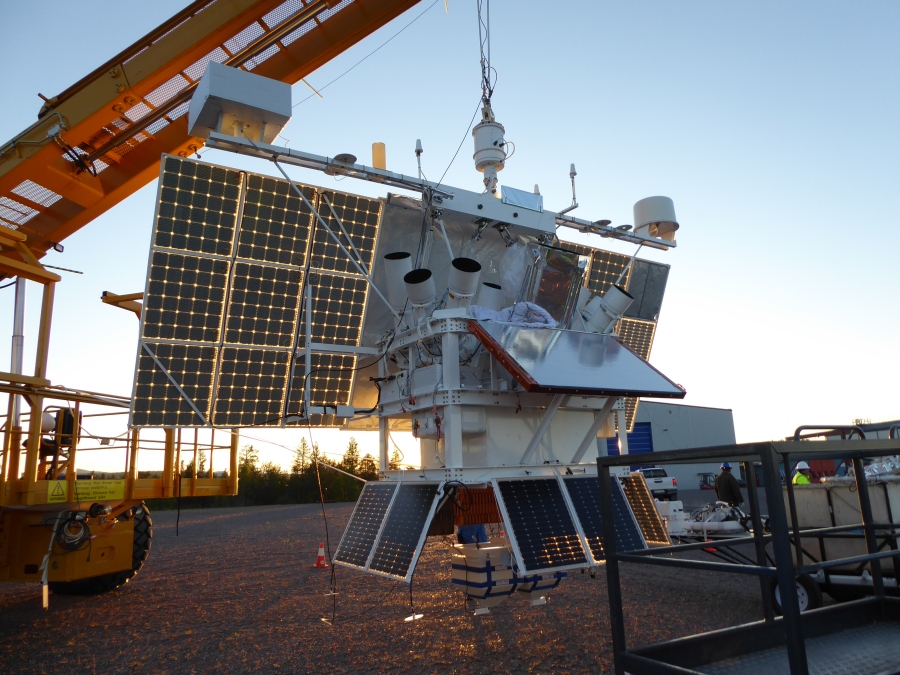 Instrument side of the gondola Instrument side of the gondola |
Grounded (15 June 2018)
Due to an anomaly which occurred in the termination system during a balloon flight from Palestine (USA) recently, all flight operations are suspended. This means that the attempt to launch HIWIND tomorrow is canceled and PMC-Turbo is bumped up the line for compatibility testing. An investigation is ongoing, but results are not expected before Monday evening.
HIWIND launch attempt #6 (13 June 2018)
Today was one of the most promising launch opportunities so far. HIWIND was picked up by the launch vehicle and taken outside the hanger for communications tests which went OK. Then the launch layout was made. That includes drawing up a plan how to position the launch vehicle holding the gondola and the balloon spool and helium trailers on the launch pad. The basic idea behind this is to have the balloon drifting with the wind in the direction of the launch vehicle once the balloon is released from the spool. Depending on wind speed, it takes several seconds for the balloon to travel the distance of more than 200 meters (the whole flight train is about 250 meters long). At the exact time the balloon reaches a position above the payload, the launch vehicle speeds up to match the speed of the balloon and then the payload released. This procedure ensures that the payload can be safely lifted up by the balloon without hitting the ground. Essentially the whole flight train act as as a huge pendulum, and it is important that the payload is released when the pendulum is at its lowest point.
Today, however, HIWIND did not make it that far. After the launch layout was made and the vehicles were positioned on the launch pad, the wind shifted towards the south. With the wind exceeding an angle of 45 degrees relative to the planned launch direction, the launch was scrubbed and HIWIND brought back inside the hanger.
 |
| HIWIND waiting on the launch pad. |
Improving lidar telemetry and more battery tests (11 June 2018)
Bjorn and Christopher did more research on the battery model while Bernd and Natalie wrote scripts for automatic processing of lidar telemetry data. Plots of important parameters such as power consumption and temperatures can now be found in the telemetry section.
HIWIND again (9 June 2018)
Another launch attempt for HIWIND was scheduled for today with estimated launch time at 2 am on Sunday. However, the weather did not cooperate and the attempt was scrubbed even before pick up of the gondola at 8 pm.
 |
| HIWIND waiting in the prime spot in front of the hangar door. |
HIWIND launch attempt (8 June 2018)
Christopher and Bjorn continued validating the battery model for PMC-Turbo by discharging and charging the batteries at a constant rate and recording battery voltage and temperature. We are still trying to figure out the best way to interpolate between the few graphs printed in the manual provided by the manufacturer. Depending on the technique, the computed state of charge varies by a few percent. Another issue is the jump in voltage when the batteries are charged, which causes additional uncertainties. As the gondola is spinning during ascent, we will transition from discharge to charge every few minutes. Keeping track of the charge and discharge cycles sounds easy enough at first sight. If the gondola and the solar arrays rotate once every few minutes, we should see a modulation in the charge current. Specifically, there is some period during a rotation when the solar arrays are facing away from the sun and thus should not generate any current. This period could be surely used for determining the state of charge of the batteries. But wait, the solar cells are semi transparent and generate some power when illuminated from the back side! On one hand that is good because we get more power during ascent, but at the same time it makes determining the state of charge of the batteries much more complicated. And we haven't even considered that the spin rate of the gondola may vary a lot. Oh well... wouldn't it be nice just to double the battery capacity and not have to worry about ruining the batteries down? Next time. Promised.
While Bjorn and Christopher were working on the battery model, Natalie and Bernd isolated and fixed a bug in the ground part of the lidar software. Six different telemetry formats are implemented in the lidar flight software, some if which can be compressed in order to save downlink bandwidth. It turned out that the size of the telemetry frames was incorrectly set when uncompromising the frames on the ground. So far we had not been using compressed frames, but now everything is tested and ready.
Finally, HIWIND was picked up at 4 pm for another launch attempt at 22 pm. The gondola was taken outside for communications tests and then, while still hanging on the launch vehicle, was brought back inside the hangar to wait for the wind to calm down. Small balloons were released at regular intervals to measure winds at low altitudes. The balloons are just short of one meter diameter, are of red color and do not carry radiosondes. Instead, they are tracked optically with the help of a theodolite. At 22:30 pm the launch attempt was called off because of shifting winds. After that people were busy with unhooking the gondola, dismounting the rotator, and saving of the payload. We will try again tomorrow.
 HIWIND is taken to the pickup location by the hangar door.. HIWIND is taken to the pickup location by the hangar door.. |
 The launch vehicle HERCULES. The launch vehicle HERCULES. |
Real time images on the web and batteries (6 June 2018)
Finally we got the data pipeline working with images being automatically processed and uploaded to the web server. Below is an example of the IR and VIS cameras. You can find the most recent images here.
 Test image taken by the airglow infrared camera. Test image taken by the airglow infrared camera. |
 Image taken by the visual camera looking towards the top of the lidar
telescope and HIWIND in the background. Image taken by the visual camera looking towards the top of the lidar
telescope and HIWIND in the background. |
Bjorn and Christopher continued to work on an empirical model of the PMC-Turbo batteries. The voltage of these batteries depend on the state of charge as well as battery temperature and discharge rate. We measure the voltage and temperature continuously (downlinked via telemetry), and the load (discharge rate) we can determine based on what electronics and devices are powered by the battery. Once we know how the voltage depends on temperature and discharge rate (luckily the manufacturer provided a few graphs), we can figure out the state of charge and, most importantly, how many minutes we have left before the batteries are depleted. Normally the solar arrays supply more than enough power to the power buses to power all onboard devices and charge the batteries. However, during ascent the gondola will be spinning, which means less power will be generated by the solar arrays, and we expect to rely on the batteries for the most part. The crux here is that the batteries are never to be allowed to get fully depleted, because if that happens, the charge controller shuts down and the batteries get never recharged even if the solar array are generating power. Without power all our experiments shut down for good and we have a mission failure! To avoid this terrifying scenario we will keep a very close eye (in fact several sets of eyes) on the state of charge of the batteries. If for some reason we are power starved during flight, we can always shut down part of the experiment (e.g. one camera) to reduce power consumption and let the batteries recharge. Loosing temporarily one camera is better than loosing all power and all science data.
Setting up the data pipeline (4 June 2018)
The daily met briefing at 11 am did not bring any pleasant surprises today. Wind speeds are expected to remain in the twenties until Tuesday evening, and there is also a significant chance for precipitation. There is clearly no launch opportunity for HIWIND until Thursday night and going outside with our PMC-Turbo payload for compatibility testing appears also very unlikely. In order to being able to control the gondola the wind speed has to be below 10 knots.
With no testing opportunity today, we concentrate on writing launch checklists and tools for automatic data processing. The software running the lidar flight computer sends a telemetry frame over the satellite links every two seconds. The 255 byte long frame contains critical information on all sub systems, e.g. temperatures, voltages and currents of the different power buses, timestamps, and information on whether systems are switched on or off, as well as their configuration. All of the science data is stored onboard on two redundant SSDs because the bandwidth of the satellite links is not sufficient for immediate transmission to the ground. However, we have the possibility to downlink a subset of the science data on request. For example, we can send a command to the flight computer to extract the most recent frame acquired by the airglow camera, reformat and compress it, and split it into small chunks which are then sent to the ground interleaved with the engineering telemetry frames. On the ground the science data has to be separated from the telemetry, chunks combined, decompressed and reformatted before the image appears finally as PNG file on the hard drive of the ground support computer. From there, the files are uploaded to a web server for distribution to the scientists. Although the process looks complicated and cumbersome, we have now set up something which we call a pipeline, essentially a handful of bash scripts which do all the work for us. These scripts run periodically and collect and process all incoming data. Today we tested the pipeline to the point where the files are written to the hard drive and uploaded to the web server. Now we need to write HTML pages to display the images.
Weather deteriorating - Day off (3 June 2018)
Waiting for good weather (2 June 2018)
With work on the hardware completed, we turned to software tests. The weather forecast looks almost depressing with high winds and precipitation. No compatibility test any time soon. The hangar is a very quiet place these days.

Testing of solar panels and lidar sun sensor (1 June 2018)
The weather was not good enough to take the gondola outside for compatibility testing and we carried out an indoor test of the solar arrays and lidar sun sensor instead. After lunch the CSBF rigging people came over to pick up the gondola with the big crane and placed it behind the hangar doors. When we opened the doors the gondola was exposed to sun light for the first time and the solar arrays started generating significant currents charging the onboard batteries. Then, while the gondola was still suspended, rigging rotated the gondola slowly around the vertical axis to map the response of the lidar sun sensor. Normally, the optical instruments including the lidar are pointed away from the sun using a rotator in the flight train above the gondola. However, since there is no direct communication between the NASA flight computer controlling the rotator and our lidar flight computer, we have our own sun sensor which allows us to determine independently the attitude of the gondola. And most importantly, the lidar flight computer can use that information to switch off the lidar detectors in case pointing is lost e.g. due to failure of the rotator, as direct sunlight entering the telescope causes fatal damage to the detectors. The sun sensor is a simple pyramid of aluminum with small solar cells mounted on its four sides. The voltage generated by the cells is proportional to the photon flux reaching the cells and is maximum if the incidence angle is normal. When the gondola rotates, the cell on the forward side sees less and less sunlight while cell on the side sees more sunlight, causing its output voltage to increase. Thus, by measuring the output voltages of the four cells we can determine the pointing of the gondola relative to the sun.
 The gondola is picked up by the crane for tests of its power systems and
sun sensor. The gondola is picked up by the crane for tests of its power systems and
sun sensor. |
 The gondola facing the sun. The gondola facing the sun. |
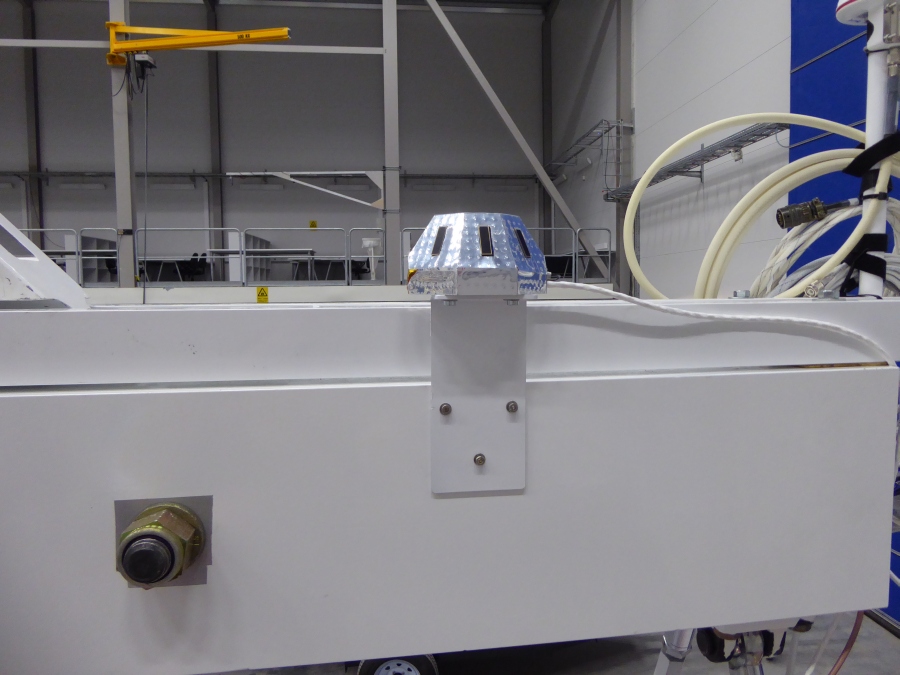 The lidar sun sensor. The black strips on the pyramid are solar cells. The lidar sun sensor. The black strips on the pyramid are solar cells. |
The Texus rocket launched (31 May 2018)
The Texus Team launched successfully their rocket at 0600 LT this morning. Woken up by the sirens blaring an hour before launch, Bernd watched the launch from inside of the hotel building. Safety rules require you to take shelter inside buildings 15 minutes before launch. With the launch pad roughly 1 km away, at first you could see a bright flash caused by the igniter followed by thick smoke oozing out of the vent holes of the launcher. Then the rocket raced into the sky, and finally, about approximately three seconds later, you could hear the rumble of the first stage rocket motor. Unlike the bigger satellite launchers, the unguided Texus rocket accelerated quickly and disappeared into the cloud layer after few seconds.
After breakfast work on the balloon payload continued. Bjorn and Christopher changed the order in which the cameras and the lidar are connected to the two onboard Ethernet switches to make the system more likely to survive in case of communications failures. Also the telemetry box was closed and readied for flight. Meanwhile Natalie wrote software which will be used to decode lidar science data in real time during flight and make the data available on our web pages.
The daily weather briefing conducted by the CSBF meteorologist dampened hopes of any quick of HIWIND or compatibility test of PMC-Turbo. Surface wind speeds are expected to increase over the next few days.
 The Texus rocket launched successfully at 0600 LT this morning. Congratulations Texus Team! The Texus rocket launched successfully at 0600 LT this morning. Congratulations Texus Team! |
 Bjorn and Christopher checking cable connections inside the telemetry box. Bjorn and Christopher checking cable connections inside the telemetry box. |
HIWIND launch attempt (30 May 2018)
Today we made the last changes to the flight hardware of the lidar. A few days ago Volodymyr discovered that, when stopping the coolant pump during ascent, the coolant in the hoses connecting the radiator to the lidar pressure vessel may freeze. The cooling system was originally designed for a launch from Antarctica where albedo is larger and more electrical power is available for powering heaters during the ascent of the balloon. Now, when launching from northern Sweden, we anticipate the solar arrays generating less power. With less heating, the coolant temperature may drop below the safe limit of the laser, and the only way to protect the laser from the cold is shutting down the coolant pump. Fortunately, a 4 W heater is sufficient to prevent the coolant from freezing within the hoses. A heat trace was built at DLR last week and installed today. Wrapped in multi-layer insulation blankets and with the heat trace on, the hoses should remain above freezing temperature throughout the flight.
Weather conditions were still sufficiently promising for a launch attempt of HIWIND. The payload was picked up in the early evening and readied for launch by the HIWIND science team. Communications testing went smoothly and number of small balloons were launched to measure wind speed and direction. Because of the enormous size of the HIWIND balloon (39 million cubic feet) launches can only take place when wind speeds are very low. Although weather conditions were marginal, the decision was made to proceed with the next step in launch preparations. The payload hanging on the launch vehicle was positioned on the launch pad in the right direction for a dynamic launch following the surface winds, the parachute was brought out to the flight line, followed shortly by the spool and helium trailer. However, with no signs of the weather conditions improving, the launch attempt was scrubbed at midnight, and within an hour HIWIND was safely back in the hangar.
 Bernd installing multi-layer insulation blankets. Bernd installing multi-layer insulation blankets. |
 Insulated coolant lines connecting the radiator to the lidar pressure
vessel. Insulated coolant lines connecting the radiator to the lidar pressure
vessel. |
 HIWIND is picket up. HIWIND is picket up. |
 HIWIND being readied for launch. HIWIND being readied for launch. |
Back at Esrange (29 May 2018)
In anticipation of the compatibility test which requires operation of the laser, Bernd travelled to Esrange today.
Communications test completed (28 May 2018)
Bjorn and Christopher and the CSBF team completed successfully communications tests today.
Traveling home (11 May 2018)
With most of the integration competed (except for the power system), Biff and Bernd left today to take a break before final testing of the payload starts in about two weeks.
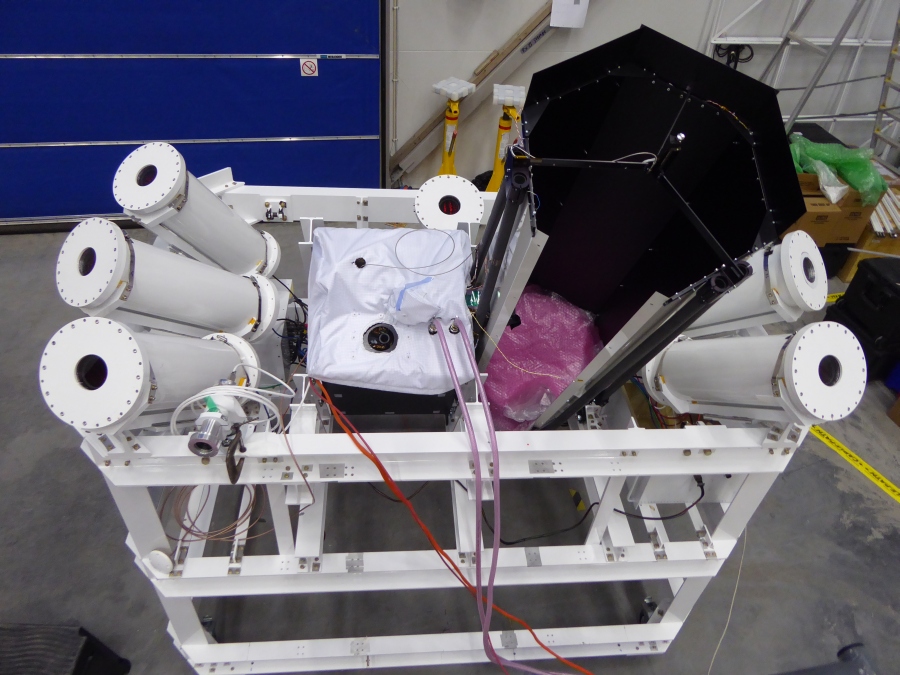
Completing the telescope and attaching the radiator (10 May 2018)
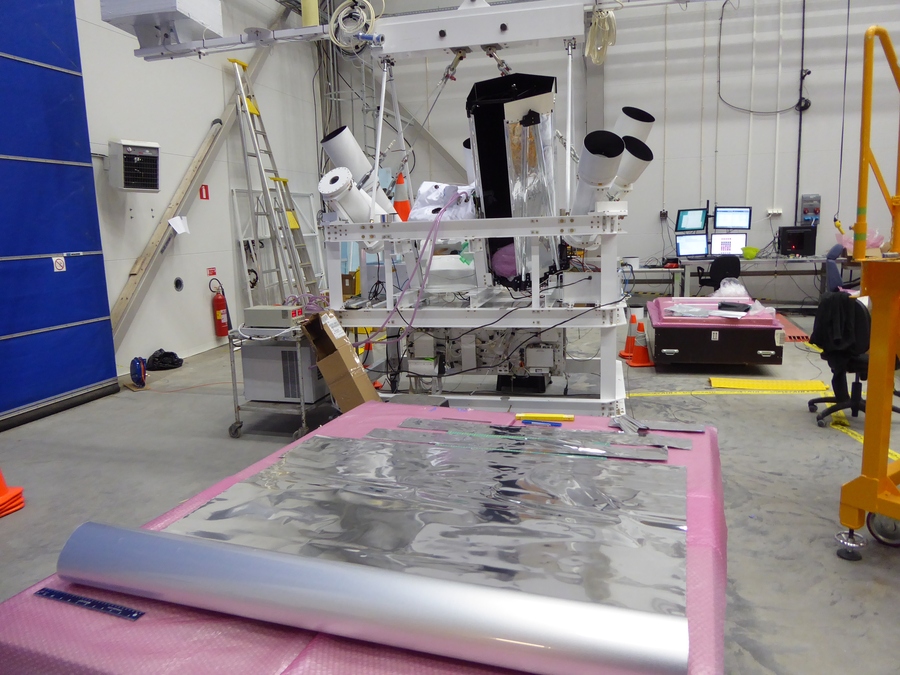 Wrapping the telescope in aluminized mylar foil.. Wrapping the telescope in aluminized mylar foil.. |
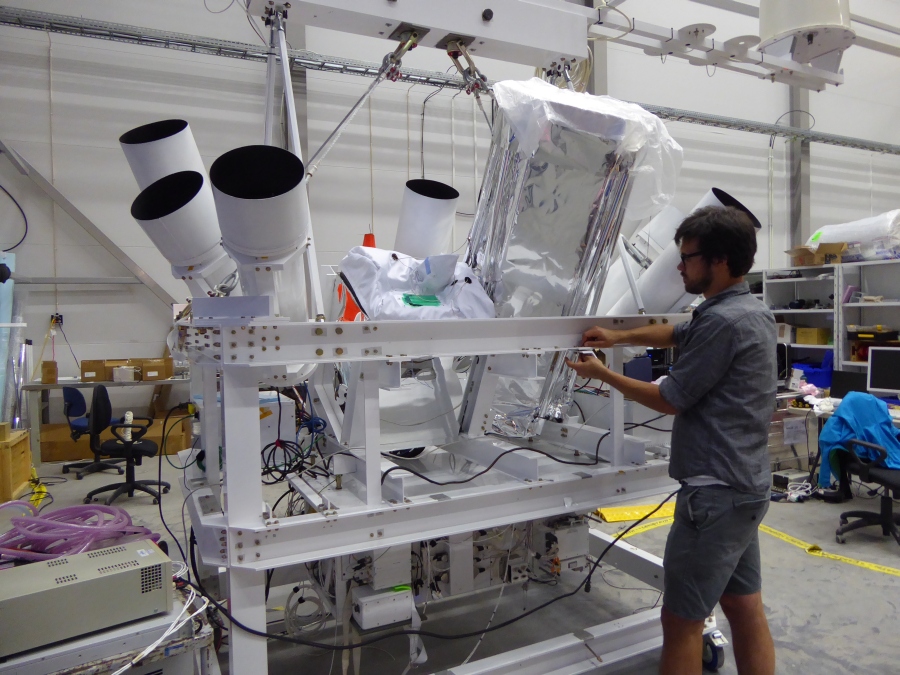 Christopher attaching mounting brackets for the
lidar radiator. Christopher attaching mounting brackets for the
lidar radiator. |
 The gondola with the radiator installed. The gondola with the radiator installed. |
 Backside of the gondola with the solar arrays still
missing. Backside of the gondola with the solar arrays still
missing. |
Installing the suspension system and antenna boom (9 May 2018)
The suspension system which connects the gondola to the rotator and also serves as a mount for the antenna boom was installed today. It consists of a triplate (attaches to the rotator with a single large bolt), a box beam to spread the load, and four rods as well as four cables. All communication antennae (NASA TDRSS high gain antenna, TDRSS omni directional antenna, Iridium Pilot, GPS and GPS compass) are mounted on the 22 feet long antenna boom on top of the box beam, which is also the highest point of the gondola and thus allows almost unobstructed communicating with satellites. I write "almost" here because we expect to loose the TDRSS link during short periods when the line of sight between antenna and satellite is blocked by the rotator.
The suspension system and antenna boom are quite heavy, so we asked rigging to come over to operate the large crane and lift the suspension system into place. With all bolts installed and the cables tightened the suspension system becomes rigid and does not collapse when the crane hook is lowered. Rigidity is especially important during landing, as otherwise the 150 pound rotator nicknamed "wrecking ball" would smash into the gondola damaging the science instruments.
After dinner we prepared for another lidar/camera test. The gondola was rolled outside at 11 pm and we started the experiments. With the sun being barely below the horizon the sky was still quite bright with no stars visible to the naked eye. However, the sensitive cameras detected about 10 stars in each image making it possible for Bjorn to run focus tests. At the same time Bernd and Natalie were busy starting up the lidar. A laser trigger fault caused some concern until we discovered that a wrong command had caused the chopper to loose synchronization, resulting in unstable laser trigger signals. Restarting the lidar system solved the problem. With the lidar now running, we verified the alignment of the laser beam and tested focusing the telescope. At 1 am we shut down all experiments and rolled the gondola in again.
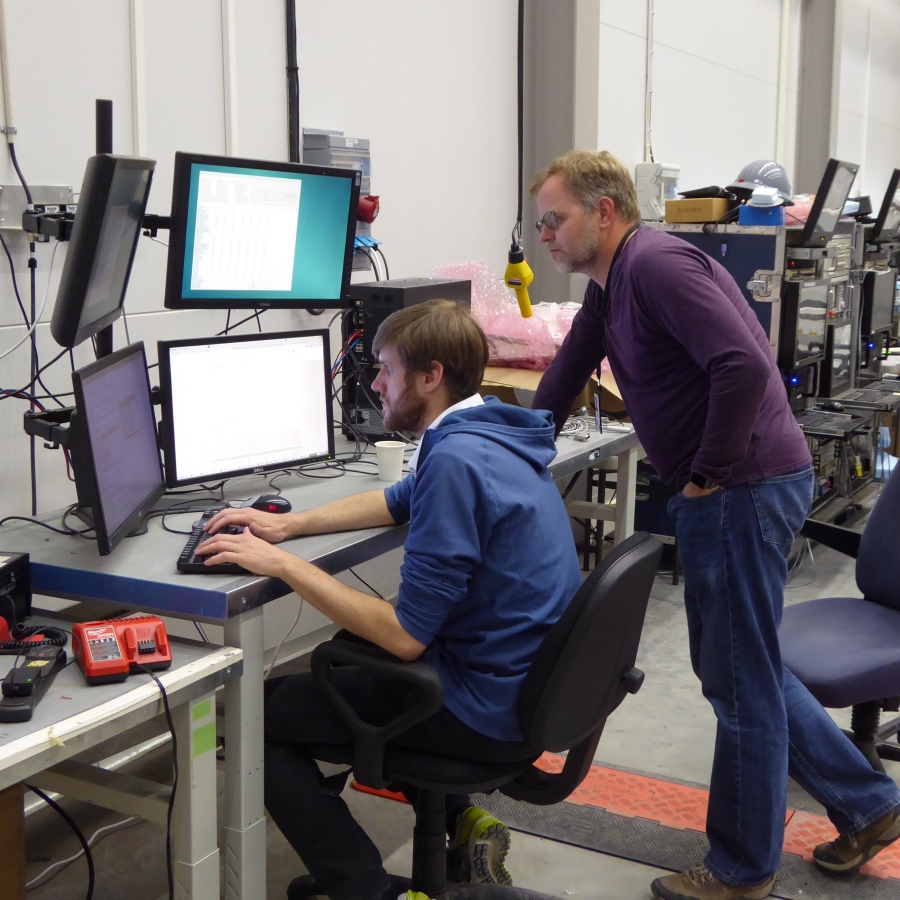 Bjorn and Biff looking at telemetry from the battery
charge controller. Bjorn and Biff looking at telemetry from the battery
charge controller. |
 Bernd attaching insulation panels. Bernd attaching insulation panels. |
 The suspension system and antenna boom are being
lowered into place. The suspension system and antenna boom are being
lowered into place. |
 Christopher installs camera baffles. Christopher installs camera baffles. |
A number of smaller tasks (8 May 2018)
While we were waiting for installation of the antenna boom, we completed a number of smaller tasks. These included purging of one camera pressure vessel with dry nitrogen, increasing the pressure inside the lidar vessel by a few percent to test for leaks, completion of the telescope radiation shields, mounting of temperature sensors at key locations of the lidar, and more software tests. We also solved the mystery of not seeing the lidar beam in the camera images. The cameras contain red filters with a cut on wavelength which is further in the red spectrum than we previously thought (approximately 580 nm). That means that the light from the laser beam (532 nm wavelength) is blocked by the filters. After dinner a group of visitors was coming to the hangar for a short tour.
More camera and lidar tests (7 May 2018)
Early in the morning CSBF rigging came over to lift the gondola using the large crane. The SIP (Support Instrument Package) which houses the NASA flight computers and communication electronics was wheeled underneath and bolted in place. After the gondola was safely on the ground again, Dell and Bjorn went on to check out the LOS (line of sight) communications link. The LOS link will be used during the first 12-18 hours of the flight for telemetry and science data downlink as well as commanding. Telemetry data is especially critical during the ascent phase when we will be relying for the most part on battery power for heating of the lidar and have to keep a close eye on the power budget.
For the rest of the day Bjorn, Christopher and Biff were busy testing various methods to verify alignment of the seven cameras. Bernd and Natalie tested the lidar software and communications. At 11 pm we started a two hour long lidar and camera test involving transmitting a low power laser beam. With the coarse alignment of the previous day, the lidar return signal was acquired quickly and focusing of the telescope could be accomplished. Bjorn also obtained pointing solutions for all seven cameras. Now we are actually ahead of our integration schedule.
 The SIP is wheeled underneath the gondola. The SIP is wheeled underneath the gondola. |
 Biff and Bjorn discussing methods to verify the camera
pointing. Biff and Bjorn discussing methods to verify the camera
pointing. |
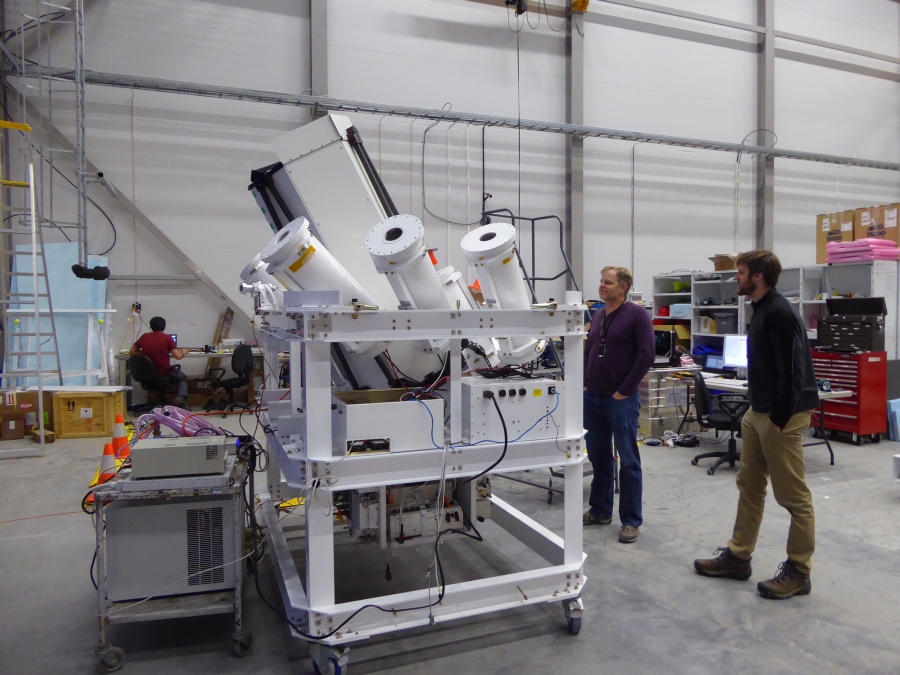
 Happy Bernd, Bjorn, Christopher and Biff after
the successful test. Happy Bernd, Bjorn, Christopher and Biff after
the successful test. |
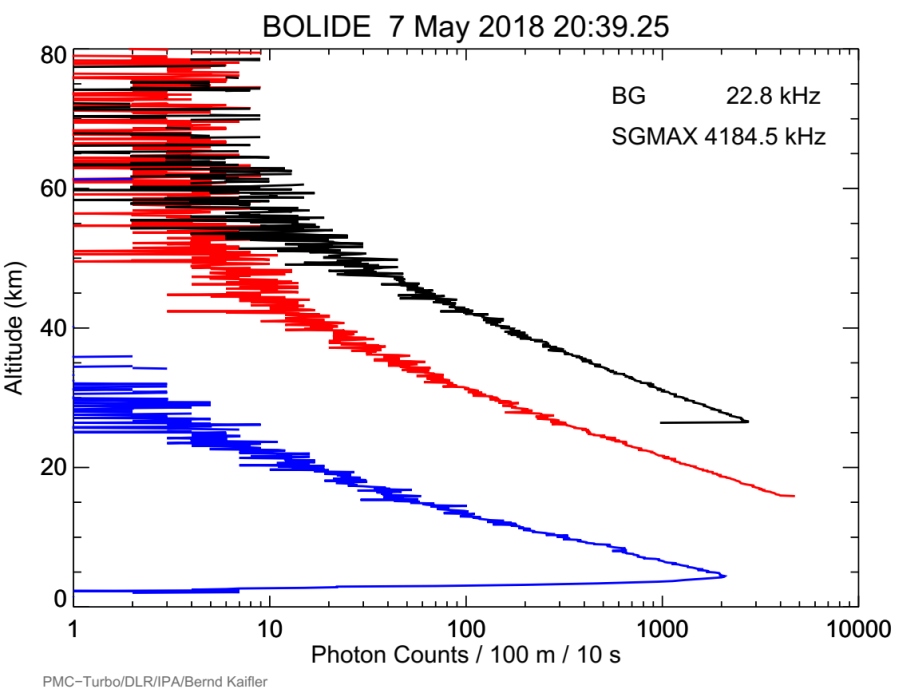 Lidar backscatter profiles for the three
different receiver channels. Lidar backscatter profiles for the three
different receiver channels. |
Camera and lidar tests (6 May 2018)
Today we tested the cameras and lidar outside the hangar for the first time. In order to being able to actually see the laser beam we had to wait until after sunset which happens around 10 pm local time. It does not get really dark anymore, and even at midnight you can comfortably read a book outside. This is actually bad for our planned tests because with increasing daylight the signal-to-noise ratio decreases significantly. In fact, the dark sky is the main reason for flying our experiments on a balloon. Although the gondola will be in constant daylight when it is at float, with most of the atmosphere below the balloon the sky above the balloon is effectively dark. Without the dark sky our sensitive optical instruments would saturate and not being able to detect Polar Mesospheric Clouds.
Since we had prepared the experiment for this test yesterday, we spent most of the day catching up on other things which were left aside during the intense work of the last few days and some of us took a nap. For the first time since we arrived at Esrange the clouds disappeared in the afternoon and temperatures started to rise. A few more days and the snow will be gone.
The airspace was closed by air traffic control at 9 pm and soon after the Range Safety Officer granted us permission to turn on the laser. We rolled the gondola outside, marked the safety zone with cones, put up warning signs and began powering up the instruments. After a safety briefing by Bernd and under the watchful eyes of CSBF's Safety Officer and the NASA Mission Manager we started up the laser for the first time. Given the very narrow field of view of the lidar telescope (approximately 0.2 mrad), it took us about one hour to find the laser beam. By that time the sky was already overcast with the laser beam barely penetrating the cloud layer. The lidar return signal was therefore weak and rapidly fluctuating, making focusing of the telescope an impossible task. We will have to repeat the lidar test tomorrow.
While Bernd and Natalie were busy getting the lidar working, Biff, Bjorn and Christopher took images with the PMC-Turbo camera systems. The idea was to take images of stars and work out the pointing solution based on the known position of the stars in the sky. Unfortunately, the overcast sky obscured all stars and no pointing solutions could be obtained. The second objective for this night, determining the position of the laser beam on camera images, also failed. We could not detect any signs of the laser beam in the narrow field of view camera. Maybe the sky is already too bright resulting in low contrast, or the lidar and/or the camera is slightly misaligned.
Shortly after midnight the clouds thickened and effectively blocked the laser beam. We decided to end the test and roll the gondola inside again. With the coarse alignment of the laser beam completed, we managed to tick off one of the critical task required before launch.
 Picture of the laser beam exiting the telescope. The
laser was running at low power and is therefore barely visible in this image. Picture of the laser beam exiting the telescope. The
laser was running at low power and is therefore barely visible in this image. |
 A weak lidar signal penetrating the cloud layer. A weak lidar signal penetrating the cloud layer. |
Preparing for the first lidar test (5 May 2018)
Good news! We just got approval from both NASA and Esrange Safety to go forward with the lidar test tomorrow night. The NASA Mission Manager and the Chief of the Balloon Program Office will be arriving tomorrow and will likely come to observe the test. Sadly, we are only allowed to run the laser at very low power, so no big light show for our guests.
Meanwhile integration of our balloon payload continued today with Biff, Bjorn and Christopher working on the battery boxes which contain four 28 volt rechargeable lithium batteries. The batteries supply power to the experiments during launch preparation and ascent when the solar array is not oriented towards the sun. After reaching 90,000 feet the NASA rotator will be engaged. The rotator points the solar arrays towards the sun for maximum power generation while the optical experiments (cameras and lidar) remain in the shadow produced by the solar arrays. The orientation is critical because all the waste heat generated by the lidar is dumped into space using a radiator which works properly only if it is facing away from the sun.
Further tasks included making cables for the ground power supply and temperature sensors, installing and adjusting the remaining camera vessels, laying cables connecting the camera vessels, and testing the battery boxes and telemetry. Bernd continued assembling the lidar. He installed the two folding mirrors which relay the laser beam from the top of the lidar pressure vessel into the telescope where the beam is directed towards the sky. Also, the optical fiber connecting the telescope to the lidar receiver was mounted and secured with lots of Kapton tape today. Another successfully completed task was the mounting of 16 temperature sensors at various locations on the telescope, piezo motors and various other critical parts of the lidar. The information from the sensors will be used later to validate the thermal model of the lidar. When the lidar was designed about two years ago, our colleagues from DLR's Institute of Space Systems built a numerical model to predict the temperatures of key lidar components. Based on this information we decided e.g. how much cooling capacity we need (the size of the radiator) and where to add insulation and heaters. However, no model is perfect and the temperature measurements will allow us to make an assessment.
Bernd's last job for today was mounting the insulation which protects the lid of the lidar pressure vessel and software tests in preparation for tomorrow's lidar test. A small but critical task completed remotely by Natalie was the addition of a dedicated "laser stop" button in the uplink command terminal. For some reason we did not have a need for such a button before, but it is part of the Laser Safety Plan and thus required for the test tomorrow.
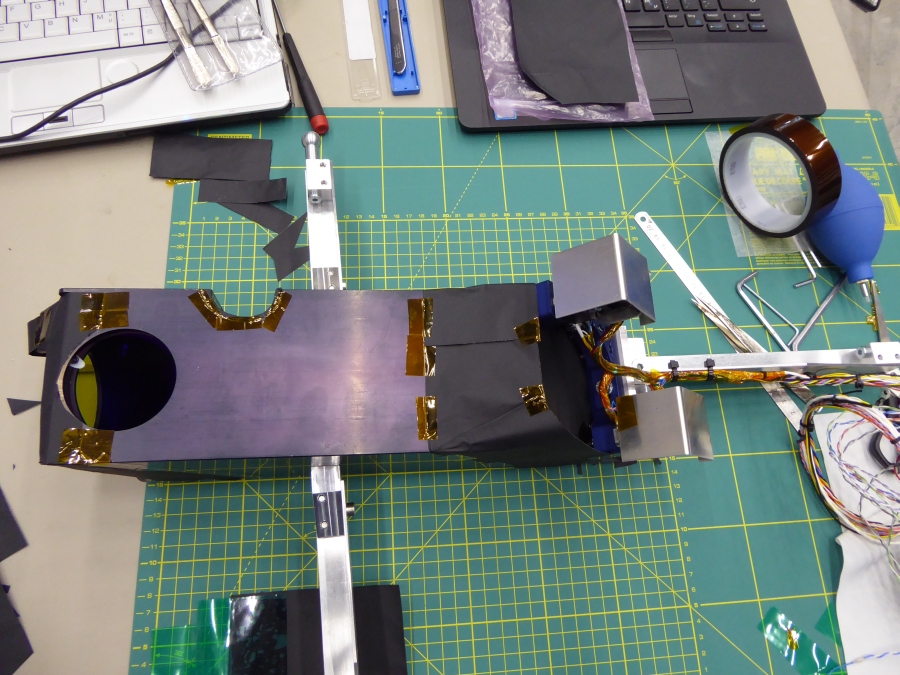 The box holding the two folding mirrors and piezo
motors. The box holding the two folding mirrors and piezo
motors. |
 Lid of the lidar pressure vessels
with beam relay optics installed. Lid of the lidar pressure vessels
with beam relay optics installed. |
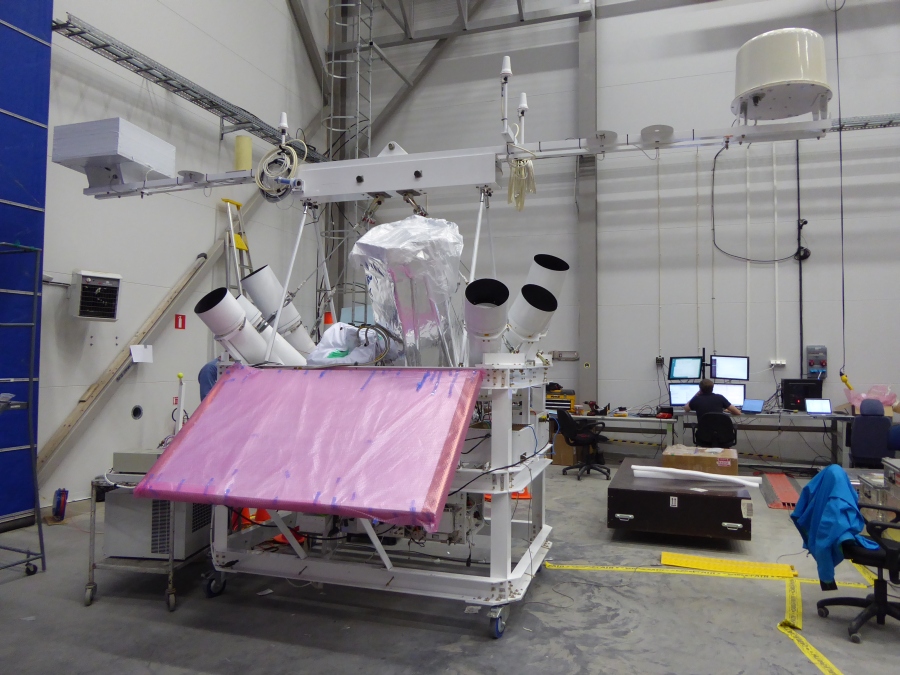
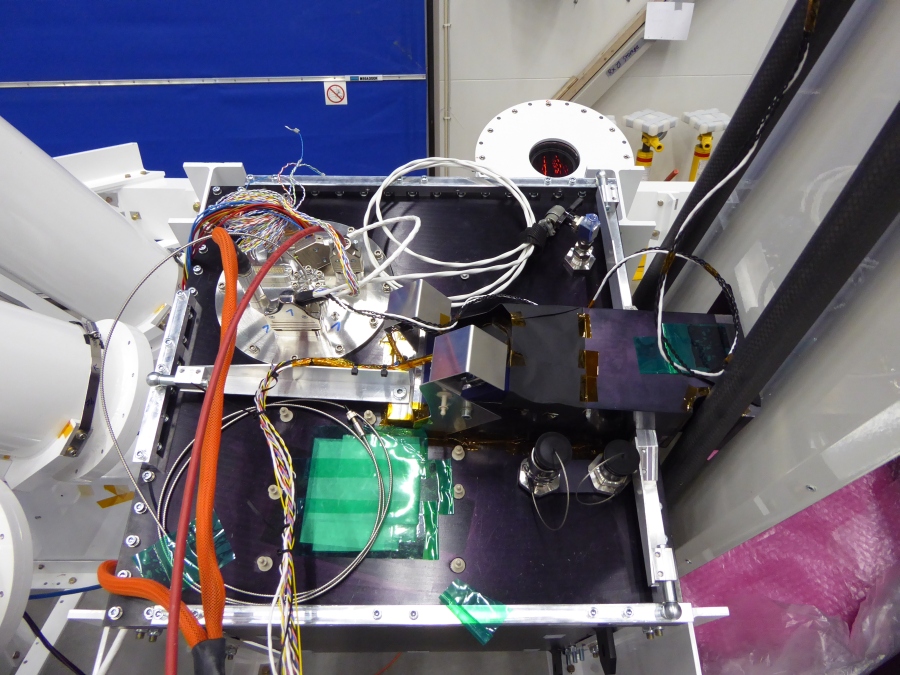
 The PMC-Turbo gondola with cameras and lidar. The PMC-Turbo gondola with cameras and lidar. |
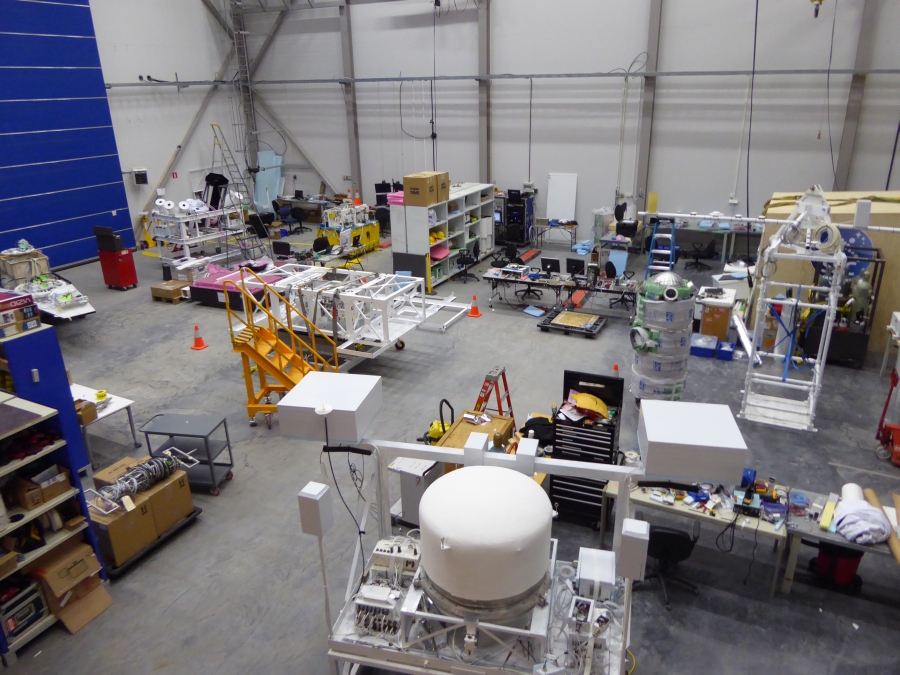 View of the Dome hangar. Three balloon payloads (PMC-Turbo
gondola is in the far corner) are prepared simultaneously for launch. View of the Dome hangar. Three balloon payloads (PMC-Turbo
gondola is in the far corner) are prepared simultaneously for launch. |
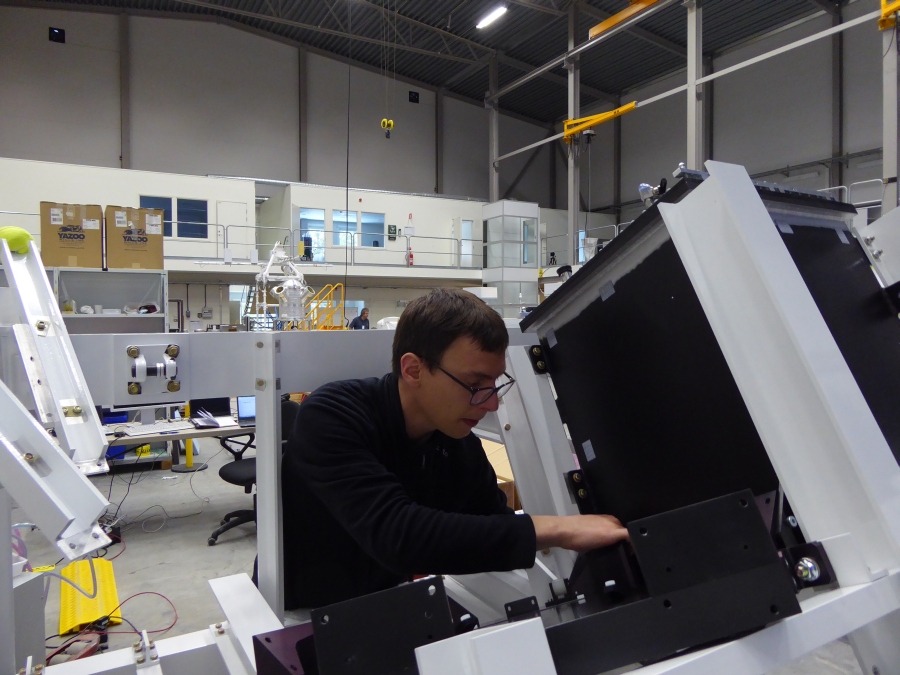
Lidar and camera installation (4 May 2018)
Today we installed the lidar telescope which occupies the central spot in the gondola next to the lidar pressure vessel. Because the field of view of the telescope is rather small (approximately 0.2 mrad), the telescope has to be firmly attached to the lidar pressure vessel in order to minimize the chance for misalignment during the balloon flight. Seven brackets hold the base of the telescope in place and some bolts are really hard to access with wrenches. As it turned out, there is only one particular sequence in which the bolts have to be mounted, and we forgot to write it down when we set up the telescope last time during integration at CSBF in Palestine. On the third attempt all bolts could be tightened and 25 inch mirror installed, followed by the superstructure, spider, and side panels. The test of the three piezo motors which are used to adjust the laser beam pointing and focus position of the telescope went well, however the piston holding the optical fiber (the lidar receiver is fiber coupled to the telescope) would not move. A dowel which normally prevents axial rotation of the piston was pushed in to far scratching the piston. The spider had to be removed from the telescope and disassembled in order to loosen the stuck dowel. About two hours later, a second test of the PZ3 motor showed the piston moving.
 Bernd tightening bolts. Bernd tightening bolts. |
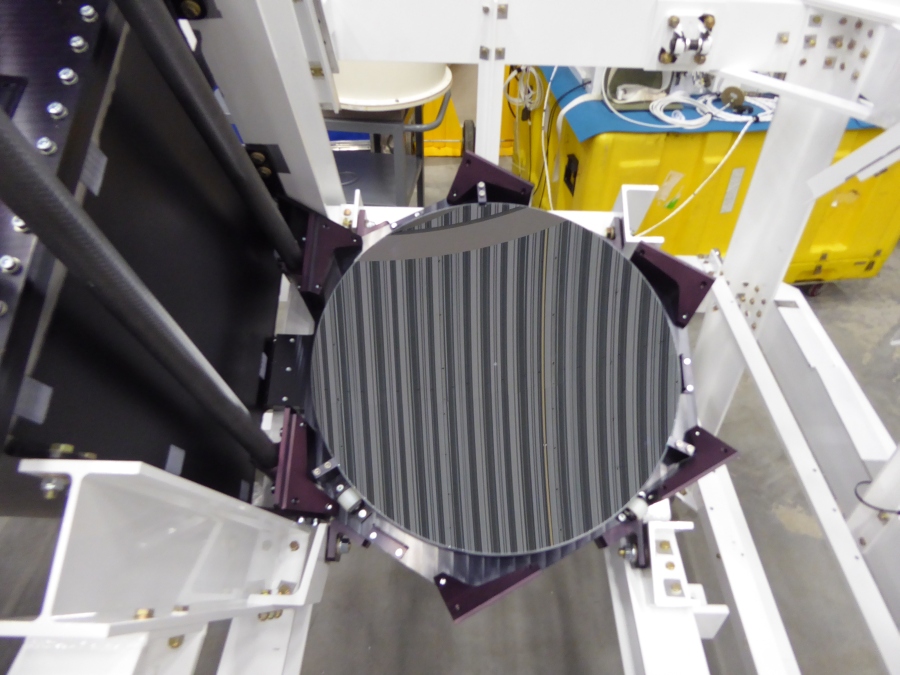 A clean telescope mirror. A clean telescope mirror. |
While Bernd was busy cleaning the telescope mirror Bjorn and Christopher mounted the cameras. There are seven independent camera systems on board the gondola, each housed in its own pressure vessel. Three cameras are attached to the outer frame of the gondola to the left and right of the lidar, respectively. The sevenths camera, which is the central narrow field of view camera, is located behind the lidar near the center of the gondola.
 Christopher and Bjorn mounting camera vessels. Christopher and Bjorn mounting camera vessels. |
 Bernd working on the telescope. Bernd working on the telescope. |
There is also some good news regarding the planned ground testing of the lidar. The NASA Radiation Safety Office agreed that Bernd is the custodian for the BOLIDE laser and Bernd can also be the Laser Safety Officer. NASA rules require the presence of a laser safety officer whenever the laser is operated. With the new documents we are now finally allowed to turn on the laser, however we are not yet allowed to release the beam into the sky. More documents related to procedures and laser safety were prepared by our Campaign Manager Chris while the PMC-Turbo team was working on the gondola. Provided approval by the Range Safety Officer, the first lidar test is now scheduled for Sunday night. Fingers crossed.
Integration at Esrange, Day 1 (2 May 2018)
First day at Esrange! The field team (Christopher, Bjorn and Bernd) arrived today in the very early morning hours. After a few hours sleep and the safety briefing at 10 am we unloaded the shipping containers and set up our workspace in the Dome hangar (picture below). CSBF rigging people supported us handling the heavy equipment.

The lidar boxes also arrived in the morning and were taken to the hanger by a giant forklift. Everything looks good so far, no visible transport damage. While Bjorn and Christopher sorted through the various boxes and containers, Bernd unpacked the lidar and powered up the lidar computers. With remote support by Natalie the latest version of the flight software was successfully installed and checked out. After dinner we performed a test of the liquid cooling system which is primarily used for cooling of the laser head and electronics. At float we pump the glycol through a radiator to radiate the waste heat into space. However, on ground the radiator is ineffective and a water chiller is slaved into the cooling loop instead to remove the waste heat. To test the cooling system, we ran the laser in non Q-switched mode for a couple of minutes and measured the heat load as well as electrical currents and voltages. All parameters were nominal - a very successful first day!