Wie funktioniert ein Lidar?
Lidar steht für “lidar detection and ranging“, was so viel wie die Detektion von Licht bei gleichzeitiger Entfernungsmessung bedeutet. Lidar gehört zu den aktiven Fernerkundungsmethoden, da das zu detektierende Licht vom Lidar-Instrument selbst ausgesendet wird. Im Gegensatz dazu stehen die passiven Fernerkundungsinstrumente, die selbst kein Licht aussenden und beispielsweise die Sonne als Lichtquelle nutzen. In unserem Fall wollen wir mit einem Lidar die Dichte der Luft messen, und zwar in verschiedenen Höhen bis hinauf zu 100 km über dem Erdboden. Das sogenannte Dichteprofil kann man dann in ein Temperaturprofil umrechnen. Letztendlich bekommen wir also von diesem Instrument Informationen darüber, wie sich die Temperatur der Atmosphäre mit der Höhe und mit der Zeit ändert. Diese Messdaten sind für uns sehr interessant, denn oberhalb der sogenannten Stratopause in ca. 50 km Höhe herrschen geradezu extreme Verhältnisse. Während sich bei uns auf der Erdoberfläche die Temperatur innerhalb eines Tages vielleicht um maximal 20 Grad ändert, kann sich die Temperatur im Bereich der Stratopause und darüber schon innerhalb weniger Stunden um bis zu 100 Grad ändern. Verursacht werden diese großen Temperaturänderungen von atmosphärischen Schwerewellen, das sind Störungen im Luftdruck beziehungsweise der Luftdichte, die sich horizontal und vertikal in der Atmosphäre ausbreiten. Diese Störungen entstehen zum Beispiel wenn der Wind Luftmassen über ein Gebirge treibt. Vor dem Gebirge werden die Luftmassen angehoben und hinter dem Gebirge fallen sie wieder nach unten. Das Anheben und Herunterfallen erzeugt Schwerewellen, die sich vom Gebirge weg ausbreiten und die wir dann in Form von Temperaturänderungen der Luft mit dem Lidar detektieren können.
Was braucht man nun für ein Lidar? Nun, im Grunde ist es ganz einfach. Man benötigt eine starke gepulste Lichtquelle, ein Teleskop um das von der Luft rückgestreute Licht aufzufangen, einen Detektor um das Licht in elektrische Signale umzuwandeln und etwas Elektronik bzw. einen Computer um die Signale aufzuzeichnen. Als Lichtquelle eigenen sich Laser hervorragend, denn diese können kurze und extrem helle Lichtpulse erzeugen. Unser Laser sendet grünes Licht aus, aber prinzipiell würde auch jede andere Farbe funktionieren. Wir verwenden grünes Licht, weil diese Art von Laser relativ einfach und vor allem kostengünstig zu bauen ist. Das Empfangsteleskop bauten wir gestern auf. Seine Aufgabe ist es einen Teil des von der Luft rückgestreuten Laserlichts zu sammeln und dem Detektor zuzuführen. Als Detektoren setzen wir sogenannte „Avalanche Photodiodes“ ein. Das sind extrem empfindliche Geräte, die einzelne Lichtteilchen nachweisen können.
In einem einzigen Laserpuls sind etwa eine Milliarde mal eine Milliarde Lichtteilchen enthalten. Diese Lichtteilchen verlassen den Laser und fliegen durch die Luft. Auf dem Weg nach oben durch die Atmosphäre stoßen eine kleine Anzahl von Lichtteilchen mit Luftteilchen zusammen. Bei den Stößen ändern die Lichtteilchen zufällig ihre Richtung, wie wenn man einen Eimer mit Tischtennisbällen auf dem Boden auskippt. Ein paar wenige Lichtteilchen ändern ihre Richtung um 180 Grad und fliegen wieder nach unten, wo sie von unserem Empfangsteleskop aufgefangen und schließlich vom Detektor nachgewiesen werden. Die Lichtteilchen sind zwar schnell, aber nicht unendlich schnell. Es dauert also eine gewisse Zeitspanne bis die Lichtteilchen eine bestimmte Höhe in der Atmosphäre erreicht haben, dort nach Stößen die Richtung ändern (das geht nun wirklich extrem schnell) und wieder unten am Boden ankommen. Da man die Geschwindigkeit der Lichtteilchen – die Lichtgeschwindigkeit – sehr genau kennt, kann man über die Messung der Zeitspanne die Höhe bestimmen, in der ein Lichtteilchen mit einem Luftteilchen zusammenstieß. Das ist die zu Anfang angesprochene Entfernungsmessung. Die Dichte der Luft bekommen wir aus der Anzahl der nachgewiesenen Lichtteilchen. Je größer die Dichte der Luft desto mehr Luftteilchen befinden sich in einem gegebenen Volumen. Es leuchtet sicher ein, dass je mehr Luftteilchen sich in einem Volumen befinden, desto höher ist die Wahrscheinlichkeit, dass ein Lichtteilchen mit einem Luftteilchen kollidiert. Mehr Kollisionen bedeutet mehr vom Teleskop aufgefangene und damit auch mehr vom Detektor nachgewiesene Lichtteilchen. Oder anders herum: mehr detektierte Lichtteilchen bedeutet eine höhere Luftdichte. Damit haben wir eigentlich schon alles. Immer wenn ein Lichtpuls den Laser verlässt starten wir eine hochgenaue elektronische Uhr und merken uns – oder vielmehr die Elektronik merkt sich – bei jedem vom Detektor nachgewiesenen Lichtteilchen den Stand der Uhr. Die Uhrzeit rechnen wir dann in die Höhe um und erhalten schließlich Messdaten in der Form: in 30 km Höhe zählten wir 413 Lichtteilchen, in 31 km Höhe 405 Lichtteilchen, in 32 km Höhe 399 Lichtteilchen, und so weiter. Das alles passiert hundertmal in der Sekunde, denn unser Laser sendet 100 Lichtpulse pro Sekunde aus. Wir bekommen also für jede Höhe die Anzahl der detektierten Lichtteilchen, die wiederum proportional zur Luftdichte in der jeweiligen Höhe ist. Eigentlich ganz simpel. Wie so oft steckt der Teufel dann in den Details, auf die ich aber jetzt nicht weiter eingehen werde. Stattdessen schauen wir uns an, wie ein Lidar in der Praxis aussieht. Hier sind nun zwei Bilder, die wir während des Testbetriebs unseres Lidars bei uns am Institut in Oberpfaffenhofen im Juli letzten Jahres aufgenommen haben.
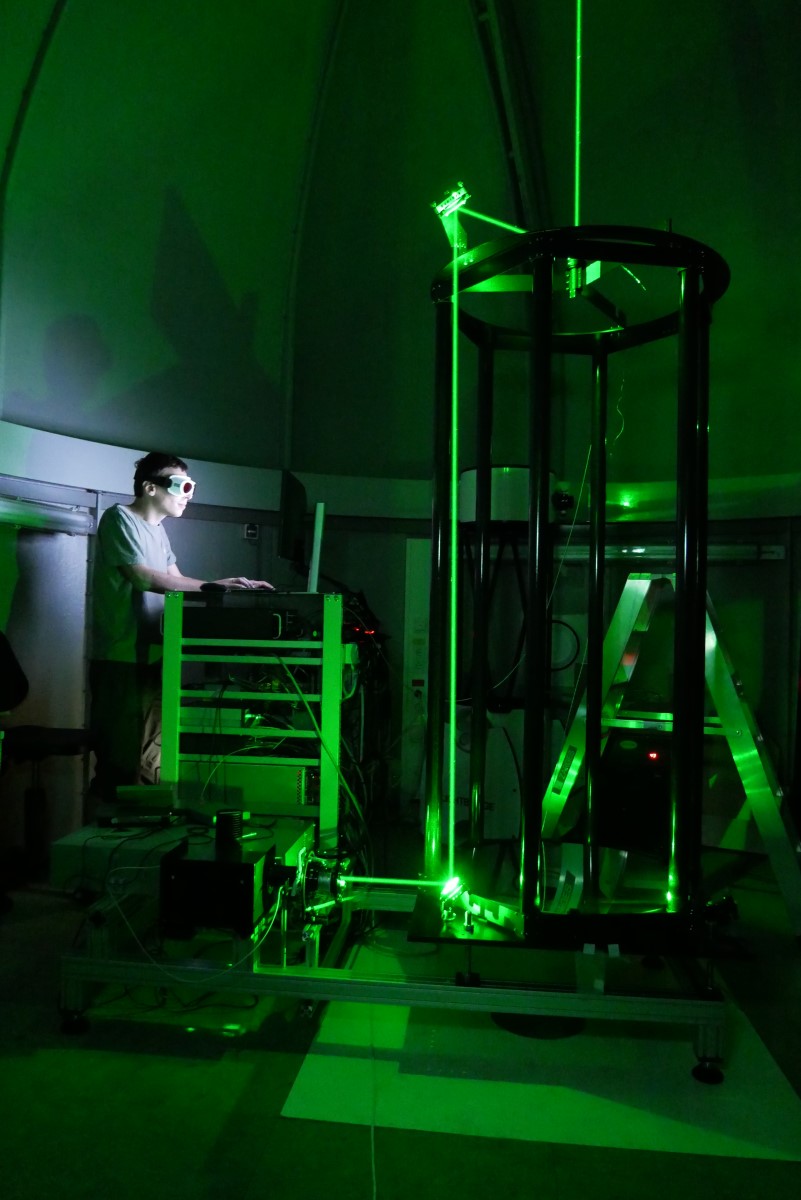
Hier sieht man das Lidar und den grünen Laserstrahl während eines Tests in Oberpfaffenhofen. Der Laserstrahl verlässt den Laser und wird über zwei Spiegel bis an die Spitze des Teleskops geführt. Dort wird er ein letztes Mal umgelenkt und zeigt schließlich senkrecht nach oben. Das Teleskop schaut dem Laserstrahl sozusagen hinterher.
 Der Laserstrahl verlässt die Kuppel mit dem Lidar-Instrument auf dem Dach unseres Institutsgebäudes und ist weithin in der Dunkelheit sichtbar.
Der Laserstrahl verlässt die Kuppel mit dem Lidar-Instrument auf dem Dach unseres Institutsgebäudes und ist weithin in der Dunkelheit sichtbar.
Der Laserstrahl ist in der Nacht so hell, dass man ihn noch aus mehreren Kilometern Entfernung mit dem bloßen Auge sehen kann. Das führt dann manchmal zu kuriosen Meldungen in der Zeitung oder Anrufen der Polizei, die die Meldungen von besorgten Bürgen weitergeben. Meistens geht es um angebliche UFO-Sichtungen oder die Frage, ob wir mit Aliens kommunizieren. Vor ein paar Jahren betrieben wir eines unserer Lidar-Instrumente an einem Standort im Bayerischen Wald nahe der tschechischen Grenze. Nach ein paar Nächten gab es eine Zeitungsmeldung über angebliche Personen, die auf der tschechischen Seite der Grenze mit Laserpointern in den Himmel leuchten würden. Die Polizei hätte jedoch keine Personen mit Laserpointern ausfindig machen können, weswegen die nächtlichen Leuchterscheinungen nach wie vor ein Rätsel seien. Nun, solch einen Laserpointer hätte ich auch gerne. Die Batterie wäre allerdings ziemlich groß, denn unser Laser inklusive Kühlung benötigt mehr als 1 Kilowatt elektrische Leistung. Wir konnten das Rätsel schließlich lösen und den Sachverhalt aufklären.
Was unser Lidar am Südpol angeht, so konnten wir heute die Arbeiten am Teleskop und an der Luke im Dach abschließen. Damit ist unser Lidar für einen ersten Test bereit, sofern denn das Wetter mitspielt. Der Test wird noch keine wissenschaftlichen Messdaten liefern. Vielmehr müssen wir erst einmal das Teleskop korrekt fokussieren und die Divergenz des Laserstrahls richtig einstellen. Danach stehen eine Reihe von technischen Tests auf dem Plan. Unteranderem wollen wir rausfinden, ob der Laserstrahl auch wirklich vollständig in das Sichtfeld des Teleskops passt. Erst wenn all diese Tests erfolgreich sind, kann der reguläre Messbetrieb beginnen.