Erstes Licht
Das Wetter ist doch nicht so schlecht wie vorhergesagt. Zwar sehen wir beim Frühstück statt Sonne nur Wolken beim Blick aus dem Fenster, aber der starke Wind ist bisher ausgeblieben. Dennoch haben wir keine große Hoffnung, heute einen Test mit dem Lidar durchführen zu können. TJ, einer der Eisbohrkern-Wissenschaftler, sollte heute mit einer LC130 Hercules nach McMurdo zurück, der Flug wurde jedoch wegen schlechten Wetters abgesagt. Wie fast alle Flüge heute. Lediglich ein Flug nach WAIS DIVIDE soll stattfinden.
Im Labor klebt Christopher die Schnittkanten der Styrodurisolierung in unserer Lidar-Box mit Panzertape ab damit keine Brösel nach unten auf die Laseroptiken und den Teleskopspiegel fallen können. Ich versuche derweil weiter herauszufinden, warum keine VPN-Verbindung von unserem Lidar-Computer zum Server in Deutschland zustande kommt. Wie bei unserem Lidar in Südamerika nutzen wir die Software openvpn für den Aufbau eines gesicherten privaten Netzwerkes. Auf dem Server sehe ich bei jedem Verbindungsversuch ein erstes Datenpaket, die Authentifizierung klappt jedoch nicht. Nach einer viel zu langen Fehlersuche dämmert es mir wieder, dass UDP ein statusloses Datenprotokoll ist. Möglicherweise wurde bei der Firewall in Denver, USA, welche den Datenverkehr zur Südpolstation filtert, vergessen, eine Regel für eingehende Datenpakete zu setzen. Im Gegensatz zu TCP-Verbindungen kann die Firewall nicht automatisch einen bidirektionalen Datenverkehr erkennen. Die IT-Leute von der Station schicken schließlich eine E-Mail nach Denver, aber für heute ist es schon zu spät. Verschiedene Zeitzonen sind einfach schrecklich. Wenn die Leute in Denver morgen anfangen zu arbeiten, haben wir hier erst einmal wieder keine Satellitenverbindung… Nun denn, jetzt stehen wichtigere Dinge an: Mittagessen. Wie jeden Tag gibt es Brokkoli, und wie fast jeden Tag: Hühnchen oder Steak. Ich entscheide mich für die vegetarische Version, also Brokkoli. Dazu: Nudeln. Der Kuchen für den Nachtisch ist heute schon alle.
Der Brokkoli weckt Erinnerungen an die Zeit auf der Davis-Station. Wie hier am Südpol bestand das Essen dort im Wesentlichen aus gefriergetrockneten und tiefgefrorenen Zutaten – und 10 Monate lang Brokkoli! Ich will nicht undankbar klingen, die Köchinnen und Köche geben sich wirklich Mühe. Man darf trotzdem von Salat träumen.
Ein Blick aus dem Fenster lässt ein paar blaue Stellen am Himmel erahnen und Christopher und ich beschließen, einen ersten Test mit dem Lidar zu versuchen. Dazu gehen wir auf das Dach und entfernen den Deckel über unserem Teleskop. In der Annahme, dass diese Aktion nicht lange dauern wird, habe ich nur ein Fleece und Handschuhe übergezogen. Nach drei Minuten auf dem Dach tun meine Ohren schrecklich weh und ich bereue keine Mütze aufgesetzt zu haben.
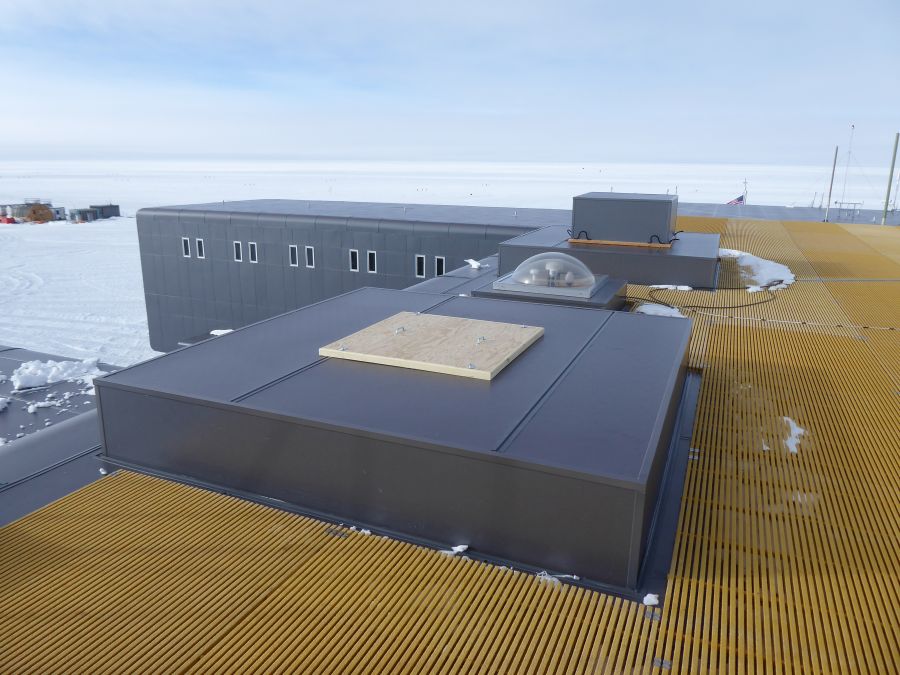 Das Dach der Station über dem B2 Labor. Unter der Holzabdeckung befindet sich unser Lidar-Teleskop.
Das Dach der Station über dem B2 Labor. Unter der Holzabdeckung befindet sich unser Lidar-Teleskop.
 Bei der Kontrolle des Lidars spiegeln sich unsere Gesichter im Spiegel des Teleskops und werden stark vergrößert.
Bei der Kontrolle des Lidars spiegeln sich unsere Gesichter im Spiegel des Teleskops und werden stark vergrößert.
Der erste Versuch mit einem Lidar ist immer spannend, denn man weiß nie, wie lange die Strahlsuche dauern wird. Strahlsuche bedeutet, man verkippt mit Spiegeln den Laserstrahl ganz leicht bis irgendwann der Strahl im Sichtfeld ist und die Detektoren das Licht des Lasers registrieren. Das Sichtfeld des Teleskops ist jedoch so klein, dass der Laserstrahl ganz in der Nähe sein kann und man trotzdem nichts sieht. Man stelle sich vor, man schaut durch einen Strohhalm auf eine 5 Meter entfernte weiße Wand und sucht auf der Wand den Kopf einer Stecknadel. Und es gibt keine Bilder oder sonstige Strukturen auf der Wand um sich zu orientieren. Ich habe schon manchmal ganze Nächte damit verbracht, den Strahl zu suchen. Heute haben wir jedoch Glück. Ich lasse den Computer den Laserspiegel jeweils zwei Schritte in alle vier Quadranten bewegen und schon nach dem ersten Umlauf sehen wir ein schwaches Signal des Laserstrahls in der Datenanzeige. Ich bewege den Spiegel weiter in diese Richtung, das Signal steigt an und fällt dann wieder ab – zu weit, also wieder zurück. Dann versuche ich die andere Achse des Spiegels, aber das Signal wird nicht größer. Wir haben den Strahl also im Sichtfeld des Teleskops grob zentriert. Die automatische Strahlnachführung (CONSCAN) würde normalerweise den Rest machen, aber das Tracking klappt nicht. Ein Problem mit der Software; nicht das einzige heute, denn mit dem Untergrundabzug stimmt auch etwas nicht. Na, das Debuggen der Software kann ja morgen lustig werden. Das Betriebssystem des Lidars umfasst mehr als 100.000 Zeilen C-Code, wovon immer noch gut 3000 Zeilen auf CONSCAN und dessen Subsysteme entfallen. Ich schiebe diesen Gedanken erst einmal beiseite und wir machen uns daran, das Teleskop zu fokussieren. Das ist ein nicht gerade ein einfaches Unterfangen bei diesen Wolken über uns. Ich probiere noch eine Weile verschiedene Systemeinstellungen aus, aber es zieht immer mehr zu und wir geben schließlich für heute auf.
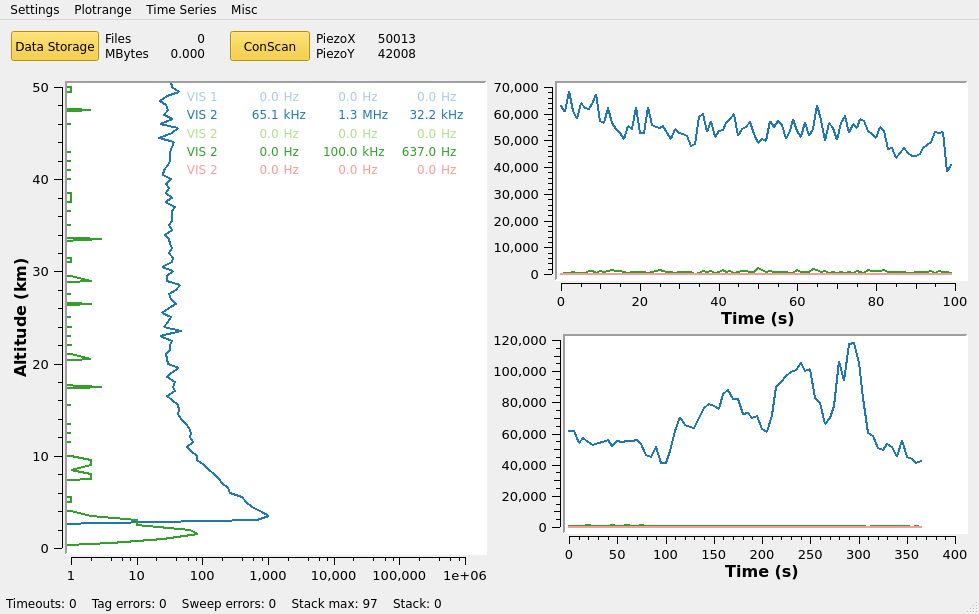 Ein Abbild der live-Anzeige während der Lidarmessung. Auf der linken Seite sieht man ein Höhenprofil (blaue Linie) der detektierten Lichtteilchen eines Empfangskanals.
Ein Abbild der live-Anzeige während der Lidarmessung. Auf der linken Seite sieht man ein Höhenprofil (blaue Linie) der detektierten Lichtteilchen eines Empfangskanals.
Was haben wir mit dem Lidar gemessen? Auf dem Bild oben sieht man auf der linken Seite zwei Rückstreuprofile in blau und grün, die von zwei unterschiedlichen Detektoren stammen. Die blaue Linie zeigt die Anzahl der von dem Detektor APD2 in jeder Höhe detektierten Lichtteilen. Deutlich kann man erkennen, wie die Anzahl der Lichtteilen von 5 km Höhe bis 15 km Höhe abfällt – das ist der Abfall der Luftdichte mit der Höhe. In 15 km Höhe und darüber sehen wir kein Signal vom Laser mehr und die detektierten Lichtteilchen stammen allesamt von der Sonne. Momentan ist es hier 24 Stunden am Tag hell, und unser Teleskop sammelt natürlich auch Streulicht von der Sonne auf. Manche Lidarsysteme haben spezielle Filter um das Sonnenlicht herauszufiltern. Dieses hier ist jedoch ein im Vergleich einfaches Instrument, was eigentlich nur für Messungen in der Dunkelheit gedacht ist. Dafür müssten wir aber noch bis März warten. Erst dann geht am Südpol wieder die Sonne unter.
Normalerweise sollten wir das Lasersignal bis in 90 km Höhe sehen können. Aber wir haben für die Tests noch einen OD3 Abschwächer im Empfänger eingebaut, d.h. nur 0,1% des Signals erreicht momentan den Detektor und das eigentliche Signal ist 1000 Mal stärker. Wir können den Abschwächer jedoch erst dann rausnehmen, wenn die Polarnacht beginnt und es dunkel wird.
Trotz des geringen Signals ist das heute bereits ein erfolgreicher Test. Im Grunde wissen wir damit schon, dass das Lidar funktioniert. Softwareprobleme kann man vor Ort lösen, auch wenn die Fehlersuche vermutlich eine Weile dauern wird. Der Albtraum auf Kampagne ist immer ein irreparabler Hardwaredefekt oder dass man ein entscheidendes Teil hat vergessen einzupacken. Die Möglichkeit, die Kampagne und viel Arbeitszeit – nicht nur die eigene, sondern auch die von Kollegen – in den Sand gesetzt zu haben, kann schon manchmal zu schlaflosen Nächten führen. Oft stecken ja Jahre der Vorbereitung in solch einer Kampagne. Was den potentiellen Albtraumfaktor angeht, residiert die Antarktis gleich hinter den Ballonkampagnen. Es scheint jedoch auf den ersten Blick so, dass wir auch dieses Mal Glück haben.